

 PDF
PDF Citation
Citation Print
Print



INTRODUCTION
The use of nickel-titanium (Ni-Ti) rotary files has become the standard for root canal preparation. Clinicians desire to use the Ni-Ti rotary files as a safe, efficient, and quick method for root canal preparation [1]. To meet these requirements, Ni-Ti rotary files have undergone several modifications with regard to their design and manufacture [2345]. However, one inherent drawback of these files is the risk of fracture from flexural and torsional stresses, which can cause fatigue failure and shear failure, respectively [6]. Dramatically higher torsional stresses have been associated with a wide area of contact between the canal walls and the cutting edge of the instrument, as well as situations in which the canal diameter is smaller than the non-active tip of the instrument; the latter phenomenon has been termed taper lock [789]. Establishment of the glide path prior to use of Ni-Ti instrumentation has been shown to reduce this stress [1011]. However, evidence is lacking in the literature regarding the size of the glide path needed to reduce stress development.
With the introduction of reciprocating motion for Ni-Ti files [12], several reports have concluded that the cutting efficiency of reciprocating motion is similar to a full rotation of the instrument and that the lifespan of Ni-Ti files is extended by using reciprocating motion [13]. In 2013, Sybron Endo (Orange, CA, USA) introduced an adaptive motion technology that aimed to combine the benefits of rotary and reciprocating motion [13]. When the instrument is not (or is minimally) stressed, its motion is exerted as a rotation of 600° in the clockwise direction, a stop, and then a restart in the clockwise direction. When the instrument engages dentin or the root canal filling, the motion of the instrument becomes reciprocal due to the increased stress [13]. This asymmetrical rotational motion has been associated with improved cyclic and torsional fatigue resistance, and its cutting efficiency has been shown to be similar to that of rotary motion [13]. To the best of the authors' knowledge, the influence of glide path establishment on the development of stress for Ni-Ti files that are subjected to this asymmetric rotation has not yet been investigated. It is recommended to use adaptive motion with the Twisted File (TF) to attain the best results, according to the manufacturer's instructions. Endostar E3 (Poldent Co., Warsaw, Poland) has a similar 3-file sequence to TF files and has matching tapers of 8%, 6%, and 4%.
The current investigation was conducted to investigate the influence of glide path size and operating kinetics on the time to reach the working length and the fracture resistance of TF and Endostar E3 files. The null hypothesis for the current investigation was that there would be no differences in the efficiency and fracture resistance of Twisted and Endostar E3 files of different glide path sizes and utilizing different operating kinetics.
Go to : 
MATERIALS AND METHODS
After institutional ethical committee approval (CSICDSR/IEC/0039/2017) was obtained, a total of 120 canals of freshly extracted single-canal intact human mandibular premolars scheduled for orthodontic extraction were included in the study. The angles of curvature of the canals were determined using periapical radiographs, and all teeth selected had angles of curvature of no more than 8° [14]. The teeth were stored in 0.25% sodium hypochlorite for the disinfection and dissolution of soft tissue debris present on the root surface. The teeth were examined for cracks, fractures, and resorption, and the presence of any of these defects warranted exclusion from the study. All teeth were sectioned at the crown root junction with a size 15 K-file (Mani, Utsunomiya, Japan) with snug apical canal fit so as to have a uniform root length of 16 mm.
The 2 methods of motion employed for this study were continuous 360° rotary and adaptive motion (Elements Motor; Kavo Kerr, Brea, CA, USA). The 2 file systems used with these 2 different forms of motion were TF (medium/large canals) (Kavo Kerr) and Endostar E3 (Basic). Both file systems have 3 file sequences. In the TF system, the 3 file sequences are file number 1 (ISO apical size 25 and an 8% taper), file number 2 (ISO apical size 35 and a 6% taper), and file number 3 (ISO apical size 50 and a 4% taper). In Endostar E3, the sequences are file number 1 (ISO apical size 30 and an 8% taper), file number 2 (ISO apical size 25 and a 6% taper), and file number 3 (ISO apical size 30 and a 4% taper).
The 3 different apical glide path sizes prepared were 15, 20, and 25. An apical glide path size of 25 was included to observe whether a medium or large canal requires further enlargement before the usage of rotary files, as well as to check whether an apical glide path size larger than 20 is required. Ten teeth were randomly allotted to each of the 3 apical glide path sizes of 15, 20, and 25 (Figure 1). The glide path sizes were manually prepared utilizing K-files (Mani) in a push-pull movement with a watch-winding motion. The estimation of working length was accomplished using a size 10 K-file inserted 1 mm beyond the root apex, and 1 mm was then subtracted from the obtained length. This measurement was confirmed using a periapical radiograph. Canal lubrication was performed using ethylenediaminetetraacetic acid (10%) with carbamide peroxide (15%) (EndoPrep RC; Anabond Stedman Pharmaceuticals, Chennai, India), and irrigation was conducted using 3% sodium hypochlorite (Parcan; Septodont, Raigad, India) with a 27-gauge conventional needle and syringe (Dispovan, Faridabad, India). Each randomly-allotted tooth was finished to the determined apical glide path size.

In each group of apical glide path sizes, 1 set of each file system was used. Thus, 6 sets of each TF and Endostar E3 file system were used. The files were utilized according to the instructions regarding the torque and speed settings set forth by Elements Motor, and TFs were used according to the preset settings available from Elements Motor itself. Each file set was designated to be used in a maximum of 10 canals. The time taken for each file to reach the working length, in seconds, was measured using a digital stopwatch. After each use, the files were wiped with gauze and inspected for any deformation or separation with the operating microscope under ×2.5 magnification, and the number of canals used was recorded. If any instrument separation occurred, the file was discarded and was not used further, and the number of canals for which the instrument was used was noted. All canal preparations were performed by a single endodontist.
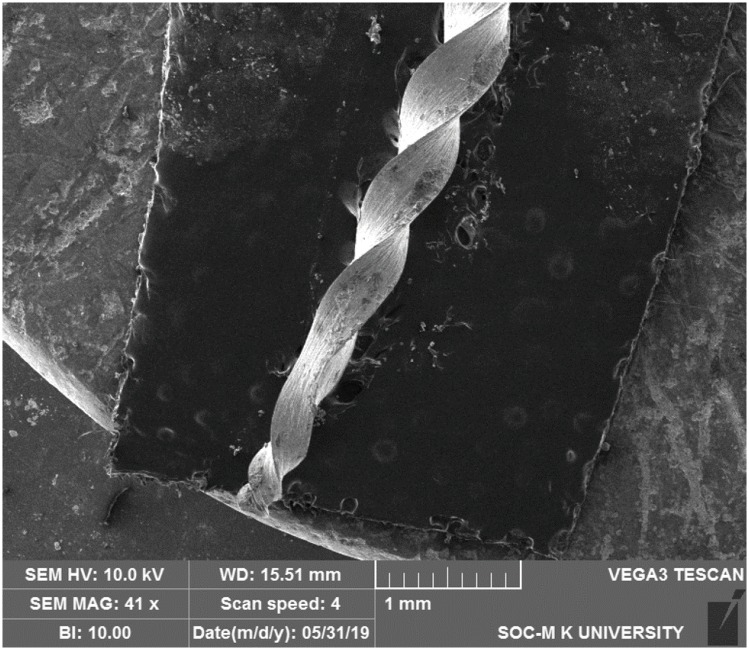
The fractured instruments were cleaned with absolute alcohol and were also ultrasonically cleaned for 90 seconds; they were then analyzed using a scanning electron microscope (SEM) (VEGA3; TESCAN, Brno-Kohoutovice, Czech Republic) to determine the type of fracture. At ×41 magnification in the lateral view and at ×650 and ×1,500 magnification in the cross-sectional view, each fractured instrument was classified by an independent examiner as exhibiting either torsional failure (associated with instrument elongation) or a flexural failure, according to the description given by Sattapan et al. [15].
Data were analyzed using univariate analysis of variance with the post hoc Tukey honest significant difference test. SPSS version 23.0 software (IBM Corp., Armonk, NY, USA) was utilized, and p values < 0.05 were considered to indicate statistical significance.
Go to :
RESULTS
Time taken to reach the working length (efficiency)
Table 1 presents the mean time taken by the 2 file systems (TF and Endostar E3) to reach the working length, and the TF system took a significantly longer time (5.71 seconds) (p < 0.05). For each of the 2 file systems, there was a significant difference in the time taken among the 3 file sequences to reach the working length, with file number 3 in the TF system (8.27 seconds) and file number 2 (6.70 seconds) in the Endostar E3 system requiring the longest times (Table 2). The least time taken for each file system was observed with file numbers 2 (3.74 seconds) and 1 (2.10 seconds) in the TF and Endostar E3 systems, respectively. The file systems tested showed no significant difference regarding the time taken between the 2 forms of kinetic motion (p > 0.05) (Table 3). The TF system took a longer time for both forms of kinetic motion than the Endostar E3 system.
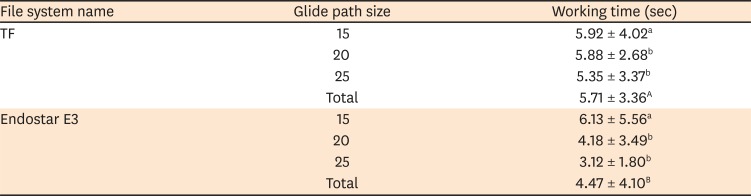
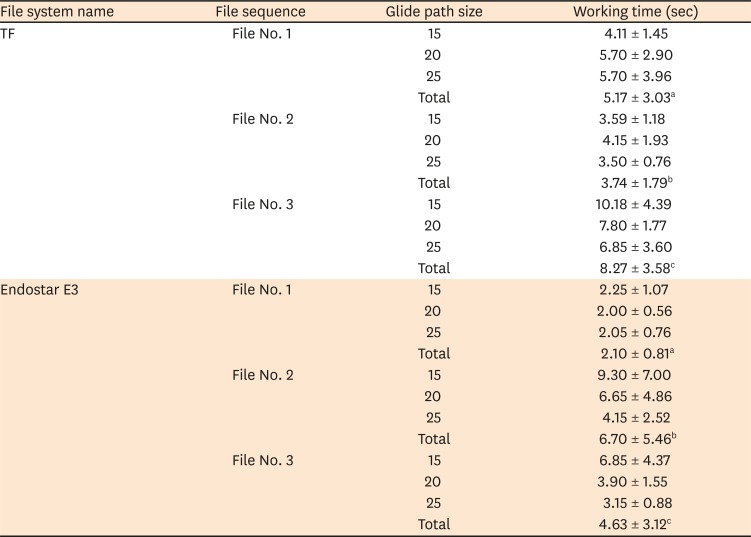
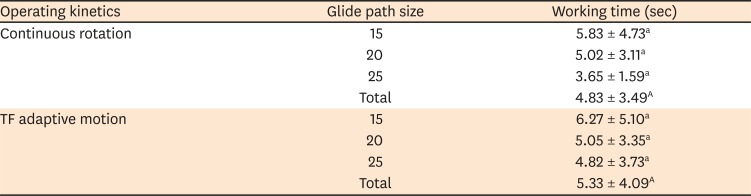
Table 1
Mean time taken in seconds to reach the working length for the different types of file systems
Data are shown as mean ± standard deviation.
The same lower case letters indicate no significant difference between the different glide path sizes of each file system (p > 0.05). The same upper case letters indicate no significant difference between the 2 file systems (p > 0.05).
TF = Twisted File.
![]()
Table 2
Mean time taken in seconds to reach the working length for the different sizes of files in different glide path sizes
Data are shown as mean ± standard deviation.
The same lower case letters indicate no significant difference between the file sequences (p > 0.05).
TF = Twisted File.
![]()
Table 3
Mean time taken in seconds to reach the working length for the different types of kinetics
Data are shown as mean ± standard deviation.
The same lower case letters indicate no significant difference between the different glide path sizes (p > 0.05). The same upper case letters indicate no significant difference between the 2 operating kinetics (p > 0.05).
TF = Twisted File.
![]()
Apical glide path size had a significant influence on the time taken by the files to reach the working length. Both file systems required significantly more time with the size 15 glide path (p < 0.05), but post hoc analysis showed no significant difference between the size 20 and 25 apical glide paths (p > 0.05) (Table 1). To a significant extent, file sequence numbers 3 and 2 with the TF and Endostar E3 systems, respectively, required the longest time when using the size 15 apical glide path (Table 2).
No significant difference was observed in the time to reach the working length according to the form of kinetic motion and the apical glide path size while adaptive motion took more time (5.33 seconds) than rotary motion (4.83 seconds) (p > 0.05) (Table 3). With both forms of kinetic motion, the 15 and 25 apical glide path sizes required the most and least time, respectively, to reach the working length.
Instrument deformation
1. TF system
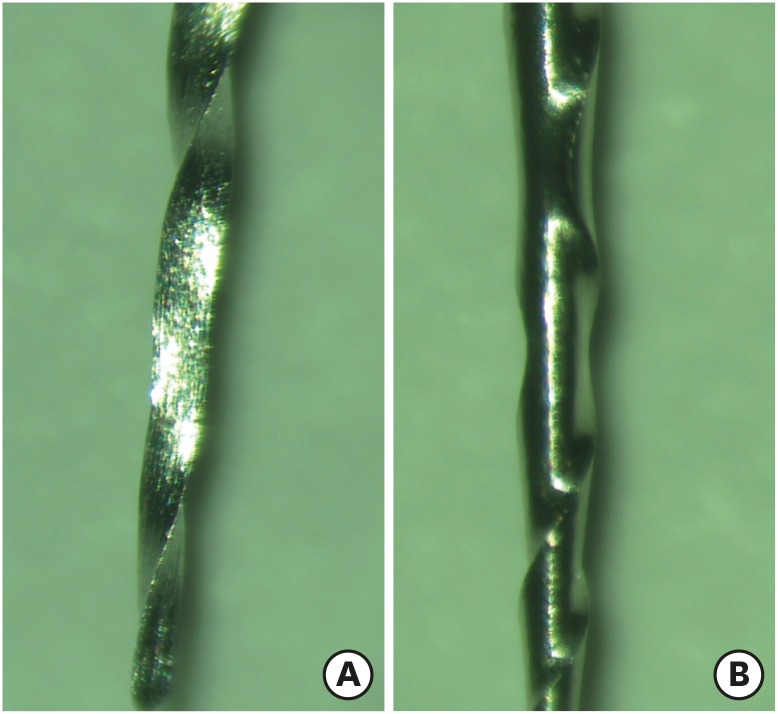
The first- and second-sequence files exhibited deformation when undergoing both continuous and adaptive motion (Figure 2A). In continuous motion, both files displayed deformation after 10 canal uses, and in adaptive motion, they became deformed after 6 and 4 canal uses for the first- and second-sequence files, respectively. In the size 25 apical glide path, the first-sequence file displayed deformation after 10 canal uses when subjected to adaptive motion. Five TFs were observed to undergo deformation; of these, 3 files were used with adaptive motion.
2. Endostar E3
When subjected to adaptive motion, only 2 third-sequence files displayed deformation in the size 15 and 25 apical glide path sizes, after 9 and 10 canal uses, respectively (Figure 2B). No files were deformed after undergoing continuous rotary motion.
In both file systems, adaptive motion was associated with a higher incidence of deformation and at an earlier stage than continuous rotary motion. Of the total of 7 files that were deformed, 5 deformations occurred in size 15 apical glide paths.
SEM analysis of the fractured instrument
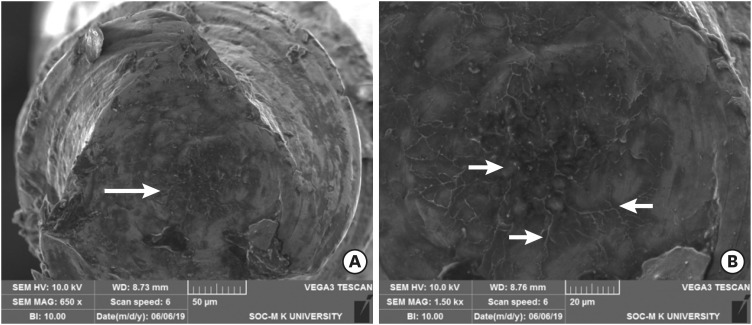
Only 1 first-sequence file in the TF system was fractured in adaptive motion in the size 15 apical glide path, during its eighth use. Under low-power magnification of ×41 in the lateral view, the instrument exhibited unwinding, showing characteristics of torsional failure according to the classification by Sattapan et al. [15] (Figure 3). However, under higher-powered magnification settings of ×650 and ×1,500 in the cross-sectional view, the fractured surfaces showed features of fatigue failure (shear fracture), such as fatigue striations (Figure 4A) and skewed dimple marks in the center of rotation of the instrument (Figure 4B).
Go to :
DISCUSSION
The results of the present study partially refute the null hypothesis, which was that no difference in efficiency and fracture resistance would exist between the TF and Endostar E3 systems. Since there was no statistically significant difference between the 2 forms of kinetic motion in the time taken to reach the working length in either of the 2 file systems, the null hypothesis must be partially accepted. However, there was a significant difference in the time taken to reach the working length between the file systems and between the apical glide path sizes. The Endostar E3 file system was used for this investigation, as it is a 3-file system similar to the TF system and with matching tapers of its 3 instruments. The TF and Endostar E3 file systems utilize an equilateral triangle-shaped cross-section and a modified S-shaped cross-section, respectively. No significant difference between adaptive and continuous rotary motion was seen in the present study, with adaptive motion taking the most time to reach the working length for the TF system. To the best of the authors' knowledge, no other study has been performed on the speed at which adaptive motion can be used to reach the working length, so a direct comparison with previous studies was not feasible. A review article by Plotino et al. [16] concluded that a reciprocating single-file system was able to reduce the canal shaping time compared to a rotary full-sequence system; this observation is contradictory to the present results. However, the results of the present investigation are in agreement with an earlier report that showed no significant difference in shaping time between reciprocating and continuous rotary motion [1718]. The explanation given for continuous rotary motion lacking a faster shaping time was that, unlike reciprocation, continuous rotary motion does not include a process of instrument release. Additionally, in our study, the time taken to reach the working length was significantly influenced by the file system, but not by the method of kinetic motion of the files. Reducing the shaping time allows clinicians to focus more of their time on irrigation activation, improving the potential for cleaning and disinfection [19]. Additionally, reduced time in contact with the canal walls is associated with less stress buildup in the files, as shown in our finding that the TF system, which is associated with more canal contact time, had a higher incidence of instrument deformation and separation.
Evidence in the literature supports the use of rotary file systems such as ProFile (Denstply Maillefer, Ballaigues, Switzerland) [19], ProTaper (Denstply Maillefer) [20], Mtwo (VDW, Munich, Germany) [17], RaCe (FKG, La Chaux-de-Fonds, Switzerland) [19], and FlexMaster (VDW) [21], which have reciprocating motion and show improved performance. In the present investigation, the Endostar E3 file system took less time to reach the working length using adaptive motion than using continuous rotary motion. However, this file system exhibited instrument deformation with adaptive motion, but not with continuous rotary motion; this aligns with an observation made under SEM in which a rotary instrument automated for reciprocation showed gross morphological deformations, most likely because of fatigue due to the periodic changes in direction [16]. Moreover, a report on the cyclic fatigue resistance of adaptive motion compared to continuous motion revealed that the TF system performed better under continuous motion. A plausible explanation for this could be the lower speed setting of 300 revolutions per minute, compared to 440 revolutions per minute with adaptive motion [22]. TF used with adaptive motion has also been shown to display significantly lower cyclic fatigue resistance in S-shaped canal preparation [23]. These observations are in agreement with the present results. In disagreement with the present observations, a report on cyclic fatigue showed that the TF system subject to adaptive motion had better performance in artificial canals with a 60° angle of curvature [24]. In this investigation, however, continuous rotary motion was not evaluated [24]. The TF system is a newer-generation file system with R-phase heat-treated Ni-Ti technology [25], whereas the Endostar E3 file system consists of older-generation Ni-Ti files. However, in terms of the time taken to reach the working length and resistance to instrument deformation, the Endostar E3 file system was found to be superior to the TF system in the present report.
An earlier investigation of the TF system in the context of retreatment published by the authors’ department also revealed that the performance of this system was not better when under adaptive motion [26]. These findings suggest that adaptive motion technology could be utilized in a better way in conjunction with instrument design specifically adapted to this movement. Files with S-shaped cross-sections have been shown to have better fatigue resistance and flexibility than triangular-based cross-section files in continuous rotary motion [232728]. Similarly, in this study, the Endostar E3 files (which also have an S-shaped cross-section) showed better resistance to deformation than a triangular-based TF system in both rotary and adaptive motion. Reciproc Blue, which has an S-shaped cross-section, and WaveOne Gold, which has a rectangular cross-section, are other files recommended for automated reciprocating movement. The performance of these cross-section files in adaptive motion must be evaluated to better understand the optimum cross-section and taper suitable for adaptive motion. Other evidence in the literature contains conflicting reports regarding the performance of reciprocating files [24].
In the present study, glide path analysis revealed that a size 15 apical glide path enlargement required significantly more time for the files to reach the working length than was the case for size 20 and 25 apical glide paths; additionally, the instruments deformed at an earlier stage and were more likely to fracture in the size 15 apical glide path. This conclusion—that a minimum apical size of 20 was required to significantly reduce the time to reach the working length and that an apical size of 15 was associated with more deformation—aligns with an earlier experiment on continuous rotary motion files [29]. Larger files in the sequence of the TF system required significantly more time to reach the working length; in Endostar E3, the second-sequence file required more time, since the first file sequence is an orifice opener with reduced cutting length, and canal preparation was not done using this instrument. Larger files require more time because they must remove more dentin to reach the working length. Further research is necessary to investigate the performance of root canal files of different cross-sections and Ni-Ti material treatments in adaptive motion. Glide path establishment with rotary files should also be studied in the context of TF adaptive motion technology.
Go to :
CONCLUSIONS
Within the limitations of this study, the TF system required significantly more time to reach the working length. The TF system and adaptive motion displayed a higher incidence of deformation and instrument separation. No significant difference was demonstrated between continuous rotary and adaptive motion. An apical glide path size of 20 required significantly less time than the other sizes to reach the working length. An apical glide path size of 15 was associated with a higher number of instrument deformations.
Go to :
 XML Download
XML Download