

 PDF
PDF ePub
ePub Citation
Citation Print
Print



Introduction
Cervical cancer is the second most common cancer globally; exceeding 275,000 deaths and 530,200 new cases in 2010 [1]. Radical hysterectomy is one of the primary treatment procedures for patients with early stage cervical cancer [2]. The procedure is a salvage therapy for who have been treated with radiation and consequently develop recurrence or persistent disease as well. There are considerable differences among surgeons as to surgery outcomes after the radical hysterectomy compared to simple hysterectomy [3]. Since the radical hysterectomy requires difficult operative techniques such as excision of the uterus en bloc with the parametrium, bilateral pelvic lymph nodes dissection, and separation of ureters, it takes long period of time for the surgeons to complete the whole procedures competently. Complications are also highly occurred during and after the surgery: severe intraoperative bleeding, postoperative voiding difficulty, various infections, lymphatic edema, fistulas, and delayed healing of the suture sites [4].
Abdominal radical hysterectomy has been a treatment of choice for cervical cancer. However, with recent progresses in gynecologic laparoscopic technology, laparoscopic radical hysterectomy with lymph node dissection (LRHND) has become a rising surgical method worldwide [5]. In addition, the Da Vinci surgical system was finally developed by Intuitive Surgical Inc. (Sunnyvale, CA, USA), and the robotic surgery was approved for gynecologic procedures in 2007 by Food and Drug Administration. The robotic radical hysterectomy with lymph node dissection (RRHND) is gaining popularity to treat the invasive cervical cancer afterwards [6].
The hysterectomies with abdominal incisions and laparoscopy are known to require long learning curves to master, on the other hand, RRHND allow a surgeon to perform whole procedures with less practices [7]. Nevertheless, not many comparative studies have been undertaken on the experience of one surgeon. The purpose of this study was to compare and determine the feasibility, surgical outcome, learning curves of RRHND to conventional LRHND in patients with International Federation of Gynecology and Obstetrics (FIGO) stage IA1–IIB cervical cancer during the same period by a single surgeon.
Materials and methods
This retrospective study evaluated 41 patients with cervical cancer who underwent either LRHND or RRHND in our institution. Twenty-two patients underwent LRHND and nineteen patients underwent RRHND from April 2009 to March 2013. All radical hysterectomies were conducted with nerve-sparing techniques. First, the identification and preservation of the hypogastric nerve in a loose tissue sheath underneath the ureter and lateral to the uterosacral ligaments; second, the inferior hypogastric plexus in the parametrium is lateralized and avoided during parametrial transection; third, the most distal part of the inferior hypogastric plexus is preserved during the dissection of the posterior part of the vesico-uterine ligament.
In LRHND, supraumbilical, right flank, left flank, and suprapubic trocars were inserted. A 10 mm supraumbilical incision was made with Hasson method, and the other three 5 mm-incisions were made followed by direct trocar insertion. The surgical procedures included class II or class III hysterectomy (according to the Piver classification) in regard to each patient's clinical condition. Bilateral pelvic lymph node dissections were performed in all patients, but para-aortic lymph node dissection was performed in selective patients according to the suspicious findings on images. Advanced bipolar was used for ligation of vessels rapidly and easily. We used delayed absorbable suture devices in all patients for vaginal vault closure by intracorporeal continuous running suture method. After surgery, the supraumbilical incision was closed layer by layer from fascia to skin. Only skin layers were closed in the other incisions.
A Da Vinci S or Si surgical system (Intuitive Surgical Inc.) were used for RRHND. This included same surgical procedures of LRHND, but the locations of trocar were different. A central arm for laparoscope was inserted to supraumbilical incision, and the other three arms were located horizontally, 8 cm apart from each trocars. At the end of the surgery, supraumbilical incision was sutured in same way. Subcutaneous and skin layer were closed in other incisions.
Variables such as patients' age, body mass index (BMI), FIGO stage, histological test results, number of dissected lymph nodes, operative time (preparing and operating time) estimated blood loss, days of hospitalization and complications were analyzed under the ethical board's approval. Preparing time was defined as the time from applying anesthesia to incision time and operating time was that from incision time to time of closure. Docking time was checked only in RRHND, and it was the time took for docking of the robotic devices. Console time refers to the duration of surgery using robotic console.
Survival times were calculated from the date of initial surgery and were considered censored for patients who were alive at last follow-up or who died without evidence of cervical cancer. Standard statistical methods were used; overall survival and progression free survival curves were generated by the Kaplan-Meier product-limit method and were compared using the log-rank test.
Learning curves were analyzed by consecutive cases using the cumulative sum (CUSUM) method. CUSUM analysis was used to quantitatively assess the learning curve of operation time, docking time, console time (CUSUM-OT, CUSUM-DT, CUSUM-CT, respectively). This technique provides a graphical information of the trend in the outcome of consecutive procedures performed over time, since it is a plot of cumulative total of differences between each data point and the mean of all data points. This approach gives a visual representation of the learning curve [89].
We used the Statistical Package for the Social Sciences 22.0 (SPSS Inc., Chicago, IL, USA) for statistical analysis. Kolmogorov-Smirnov test was used to verify standard normal distributional assumptions. Student's t-test and Mann-Whitney U test were used for parametric and non-parametric variables, respectively. Differences between proportions were compared using Fisher's exact test or χ2 test. P<0.05 was considered to be statistically significant.
Results
1. Patients and tumor characteristics
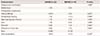
The patient demographics are shown in Table 1. No significant statistical differences were found with respect to age (P=0.066), BMI (P=0.868), histology (P=0.386), history of abdominal surgery (P=0.737) and the number of patients who were found to have positive pelvic nodes (P=0.115) in comparing LRHND and RLHND. FIGO stage also showed no statistical differences (P=0.436).
Table 1
Patients and tumor characteristics

Data are shown as mean±standard deviation or number (%).
LRHND, laparoscopic radical hysterectomy with lymph node dissection; RRHND, robotic radical hysterectomy with lymph node dissection; BMI, body mass index; FIGO, International Federation of Gynecology and Obstetrics.
a)Student's t-test; b)Pearson's χ2 test; c)Mann-Whitney U test; d)Fisher's exact test.
![]()
2. Surgical outcomes
As seen in Table 2, variables such as preparing time, operating time, estimated blood loss, number of dissected lymph nodes (pelvic/para-aortic, positive, total), hospital stay and amount of transfused blood were compared in each procedure. The preparing time of RRHND was significantly longer than LRHND (51.8±10.4 vs. 42.5±14.1; P=0.023). No conversions from laparoscopy to laparotomy or abdominal surgery were required in any of 22 cases. There was no conversion to the conventional laparoscopy in RRHND group either.
Table 2
Surgical outcomes

Data are shown as mean±standard deviation or number (range).
LRHND, laparoscopic radical hysterectomy with lymph node dissection; RRHND, robotic radical hysterectomy with lymph node dissection.
a)Student's t-test; b)This shows median number and range of paraaortic lymph nodes from selective patients with positive paraaortic nodal metastasis on pre-operative images (1 patient in RRHND, and 3 patients in LRHND).
![]()
3. Intraoperative and postoperative complications
Complication data were categorized into intraoperative and postoperative complications (Table 3). There was only one intraoperative complication in LRHND (P=1.000): about 1 cm laceration of bladder. The injury was repaired immediately during the surgery. Six complications occurred after the surgery: voiding difficulty, postoperative oozing bleeding, weakness of left extremities and left facial paresthesia due to right basal ganglia infarction, unknown fever, peritonitis and dehiscence of trocar site. In the LRHND group, 9 patients experienced a postoperative complication (6 void difficulty, 1 postoperative bleeding, 1 right basal ganglia infarction, 1 fever). On the other hand, in the RRHND group, 4 patients experienced a postoperative complication (2 bleeding, 1 peritonitis, 1 dehiscence of trocar site). Voiding difficulty was the only complication which was significantly higher in LRHND group (27% vs. 0%; P=0.023). With respect to total complication rate, there was no significant differences between the 2 groups (41% vs. 21%; P=0.200).
Table 3
Intraoperative and postoperative complications
Data are shown as number (%).
LRHND, laparoscopic radical hysterectomy with lymph node dissection; RRHND, robotic radical hysterectomy with lymph node dissection.
a)Fisher's exact test; b)Pearson's χ2 test.
![]()
4. Oncologic outcomes
Overall survival and progression free survival were analyzed in both groups (Fig. 1). The 5-year survival rate was 90.9% and 84.2% in both groups (in LRHND and RRHND, respectively), and there was no difference between 2 groups (P=0.289). The difference of 5-year recurrence rate between 2 groups was not statistically significant also (85.9% vs. 67.1%, LRHND vs. RRHND; P=0.184)

5. Learning curves
Fig. 2 shows the operation time plotted chronologically according to the case number. This learning curve was obtained by plotting the cumulative sequential differences between each data point and the average operation time, using CUSUM-OT, which was best modeled as a second-order parabola. The learning curve was divided into 2 distinct phase in both type of operation. In LRHND, a negative slope of initial 12 cases with an average lower than the process average showed phase 1, and a positive slope of next 10 cases with an average higher than the average showed phase 2. Increased competence of surgeon could be observed after the first 12 cases from this data. Same pattern of 2 phases was also obtained in RRHND. CUSUM value of 13 divided the learning curve into former negative slope and latter positive slope, and the linear regression confirmed the negative and positive slope of each phase (Fig. 3).
 | Fig. 2Learning curves using cumulative sum of operation time. (A) Laparoscopic radical hysterectomy. (B) Robotic radical hysterectomy.
CUSUM-OT, cumulative sum of operation time.
|
 | Fig. 3Two phases in cumulative sum of operation time in robotic radical hysterectomy. (A) Phase 1. (B) Phase 2.
CUSUM-OT, cumulative sum of operation time.
|
In RRHND, CUSUM-CT and CUSUM-DT were also obtained from the data as second-order parabola (Fig. 4). The CUSUM-CT also showed slope change after 13th case, making biphasic appearance with initial negative slope and latter positive slope. On the other hand, the slope of CUSUM-DT was changed at 9th case, which started with positive slope and ended with negative slope.

Discussion
For the last decades, the introduction of robotics to gynecological operations has been one of the most remarkable advances for the treatment of cervical cancer, especially for patients with early stage. In Korea, there is a clear trend to move toward minimally invasive surgeries by computer-assisted surgery with robotic assistance in all medical fields [101112]. Surprisingly, the trend has not progressed rapidly in gynecology, as many surgeons are worried about worse surgical outcomes, postoperative complications and perceived long learning curves. Our goal in this study was to put an end to hesitance of surgeons by comparing the LRHND and RRHND objectively.
Kruijdenberg et al. [13] showed that mean operative time, blood loss, and number of retrieved lymph nodes did not statistically differ between the total laparoscopic radical hysterectomy (LRH) and robotic radical hysterectomy (RRH). The rate of major postoperative complications, however, was higher in patients who took robotic surgery. The author concluded that RRH is equivalent to total LRH with respect to surgical outcomes and short-term oncologic prognosis.
In the present study, operating time, estimated blood loss, number of dissected lymph nodes and day of hospital stay were not significantly different, which somewhat correlates to the conclusion of the review article. Our study showed longer preparing time in RRHND than in LRHND, and attributing factors are assumed to be patient positioning and stabilization on the operating table, positioning of the assistant surgeons next to the robotics, and initial setting time of robotic system adequately.
Analysis of complications, we noted the reduced total number of complications in RRHND (41% vs. 21%), although it failed to show statistical significance. Besides, the difficulty of self-voiding was significantly lower in RRHND as mentioned above (P=0.023). The difference in complication rate can be explained by the enhanced visual field of 3-dimensional robotic surgical platform, articulating movement of robotic arms, and consistently exposed surgical plane, which could give advantages for nerve-sparing surgery. Also, there were no severe complications occurred such as intraoperative laceration of other organs and cerebral infarction in RRHND.
The CUSUM method was developed during World War 2 from industry and munitions lines [1415]. It highlighted the difficulty with statistical tests of a process that was constantly changing and a sample size that was constantly growing. The requirement underpinning these methods was to define whether or a process was “in control” or “out of control.” Within medical training it should be possible to define limits for certain procedures that agree an acceptable level of performance and more importantly what level is unacceptable [1617]. Using CUSUM method, a shift in the learning average can be observed more easily by a graph than in a standard control chart format, enabling investigators to visualize the data for trends.
In this study, the CUSUM-OT graph showed 2 distinctive phases (Figs. 2 and 3). The first negative slope means lower average of operation time with greater variance from the overall average, representing initial learning curve. The latter positive slope indicates an average higher than the process average, representing a higher average of operation time than overall average due to more complicated cases after proficiency of technique. The CUSUM method can be used to demonstrate the level of competence with a surgical technique, since it is better at detecting small shifts in the process mean, as shown in this study.
The CUSUM-OT of LRHND and RRHND showed similar aspect in this study. This was not in accord with our expectation that RRHND would require less time for training. This might be due to the longer interval between first few cases in RRHND than in LRHND. Patients of initial period had some troubles of deciding to undergo robotic surgery due to lack of information about robotic system and expensive charge for a surgery. Consequently, initial few cases were undergone with intervals of 3 to 11 months, which would interrupt the adaptation of a surgeon to robotic system. Besides, this surgeon was already skillful with laparoscopic surgery at the time of initiation of LRHND due to abundant experience on benign surgeries. In this study, the surgeon showed proficiency on LRHND after 12 cases, and this period is shorter than other previous studies [1819]. These 2 factors could have contributed to make the difference smaller between 2 learning curves of each surgical procedure.
The CUSUM-CT in robotic surgery also showed biphasic pattern with slope transition from negative to positive after 13th case (Fig. 4), so we could assume that the surgeon needed at least 13 surgical cases to be acclimatized to new robotic system in field of radical hysterectomy. However, CUSUM-DT in robotic surgery showed biphasic slope with opposite sequence. The first 8 cases showed positive slope which means higher average of docking time from procedure average, and the latter 12 cases showed negative slope meaning lower average of docking time. The docking procedure of robotic system does not require complex order or difficult skill the surgeon could adapt to the system in a short period of time, and the level of difficulty of a surgical case would not influence the docking time after proficiency.
This study has several limitations. First, this cohort represents a small window of learning curve data of a single surgeon, which may not be generalized to public. However, single surgeon experience is important to consider, when taking in account that this surgeon is one of the whom have widest experience of diverse gynecologic oncologic surgery in our country.
Second, the paraaortic lymph node dissection was not performed in all patients. We initially evaluated nodal status through computed tomography and positron emission tomography-computed tomography. Only a few patients with positive paraaortic lymph node on the images were conducted paraaortic lymph node dissection (1 in RRHND, and 3 in LRHND). These might have altered the survival or complication rate in this study.
Third, there are two patients who are diagnosed as stage IIb cervical cancer in study population. One patient was clinically considered as stage Ib2, but the pathologic result included parametrial invasion of cervical carcinoma. The other patient was diagnosed as small cell carcinoma of cervix with stage IIb. This patient was treated with initial concurrent chemoradiation, but the clinical course had gone poor, even after we changed the chemotherapeutic regimen for 3 times. The surgery was performed for palliative purpose because of the refractory condition. But the overall survival was acceptable in whole study population even after including these two patients, so we think our decisions were proper managements.
Finally, the various surgical steps of robotic surgery may alter learning curve outcomes of operation time. For example, operation time could be subdivided into incision, trocar insertion, initial robotic setup, docking, and console time according to the steps of procedures. Each specific robotic procedure is known to have its own unique learning curve [20]. The set-up of the robotic system may be time consuming and affect data at first.
In conclusion, the surgical outcomes and complication rates of RRHND were comparable to those of LRHND during about 20 cases. RRHND could be appropriate surgical approach in patients with cervical cancer with favorable outcome of less voiding difficulties. And a minimum of 13 cases of robotic radical hysterectomies are required to achieve surgical improvement in the treatment of cervical cancer for an experienced surgeon. We believe that defining of the learning curve is necessary to reduce the risk according to complex procedures performed by incompletely trained surgeons.
 XML Download
XML Download