

 PDF
PDF ePub
ePub Citation
Citation Print
Print


INTRODUCTION
At Severance Hospital, Yonsei University College of Medicine, we have started minimally invasive and laparoscopic surgery at an earlier stage of history in our country and now we are the leading hospital in robot and minimally invasive surgery with the generous support from many brilliant surgeons. Since laparoscopic cholecystectomy has started at our hospital (Gangnam Severance Hospital, Yonsei University Health System, Seoul, Korea) in 1991, many surgeons have been trained in the era of laparoscopic and minimally invasive surgery. Furthermore, numerous procedures have been applied for laparoscopic surgery, and many patients have benefited as a result. Meanwhile, several new technical devices which are commonly referred to as “automatic” or “robots” have been introduced in our hospital. We have performed the first automated surgery in Korea using the AESOP (automated endoscopic system for optimal positioning) in June, 1996, and the first robotic surgery using the da Vinci surgical system in July, 2005 [1]. During a period of 10 years after the introduction of the da Vinci system in 2005 we have performed more than 15000 cases of robotic surgery successfully.
In this review we are going to describe several things about current experiences of laparoscopic and robotic surgery at our university as follows: 1. Overview of robotic surgery 2. History of minimally invasive surgery (MIS) & laparoscopic surgery at Yonsei University. 3. 10 year experience of the da Vinci surgical system at Yonsei University. 4. Developments of Korean surgical robotic system and recent development of the robotic system.
OVERVIEW OF ROBOTIC SURGERY
The term “robot” was introduced in the play “Rossum's Universal Robots” by the Czech playwright Karel Capek in 1923. The Czech word robota means slave. In this play, robot-mechanical objects, designed for drudgery, take over the human race. During the remaining decades of the 20th century, the notion of robots was an enormously popular theme for works of science fiction.
In 1939, Isaac Asimov solidified the modern science fiction genre of robotics in his short story “Strange Playfellow” but altered our thinking about robots in “Runaround” in 1942 by formulating the Three Laws. He took an engineer's perspective on advanced robotic technologies. The three Laws of Robotics are as follows
First Law: A robot may not injure a human being or, through inaction, allow a human being to come to harm
Second Law: A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.
Third Law: A robot must protect its own existence as long as such protection does not conflict with the First or Second Laws.
In films, robots ranged from friendly companions to vicious predators manipulated by villains to autonomously functioning machines rising again in humanity. Unlike robots of science fiction, these robots are driven by computers that are, in turn, programmed for specific tasks. However, presently, surgical robots are mere instruments that are remotely manipulated by a surgeon using an electromechanical interface. Present-day surgical robots are not autonomous nor are they driven by preprogrammed computers.
Surgical robotic systems grew out of the concept of telesurgery-that the surgeons did not need to be at the patient's side to conduct the operation-which was explored by the military and NASA in the 1970s and 1980s. In 1986, Phil Green an engineer at SRI International, developed a system that would allow the surgeon to manipulate a remote object. The first model was tested by Satava. Following the successful testing of this one-armed system, the Advanced Biomedical Technologies Program at the Defense Advanced Project Agency (DARPA) funded the development of a prototype surgical robotic system. The initial thrust of this program was to develop systems that could be used to treat injured soldiers on a battlefield in remote locations around the world. The particular military application has not been realized until now. However, the concepts of three-dimensional (3-D) visualization, heightened dexterity, and fine instrument manipulation have been incorporated into surgical robotic systems.
In the 1990s, it was clear that computer-enhanced instrumentation had the potential of solving the limitations of conventional videoendoscopic techniques.
The first computer-enhanced surgical instrument was the RoboDoc (Integrated Surgical Systems, Sacramento, CA) in 1992. RoboDoc enabled precise drilling of the shaft of the femur by orthopedic surgeons. AESOP (automated endoscopic system for operative positioning) (Computer Motion Inc, Santa Barbara, CA) was introduced in 1994. AESOP gave the surgeon control of the videoendoscope. It provides a stable field of vision and was directed by voice commands by the surgeons.
In the late 1990s, two robotic surgical systems were introduced. They are the Zeus system (Computer Motion, Goleta, CA) and the da Vinci system (Intuitive Surgical, Inc., Menlo Park, CA). They were the current state-of-art systems that have received Food and Drug Administration approval and have been validated in a number of specific areas by rigorous scientific evaluation. They both have a surgeon console connected by an electronic interface to robotic arms that are driven by cables and are used to manipulate the videoendoscope and the surgical instruments. The Zeus surgical system and da Vinci surgical system are not true robots because they lack independent motions or preprogrammed actions [3]. The term “telemanipulator” or “telesurgery” is more suitable. The two robotic surgical systems are conceptually similar but they are different in several points (Table 1).
The Zeus system was introduced in 1998. It has an open workstation that gives the surgeon direct external view of the operation room. It uses a traditional monitor of 2-D visualization (later with a computer-simulated 3-D visualization system using special glasses). The Zeus arms consist of three separate working arms (3 AESOPS) that are independently fixed to the operating room table. The Zeus arms have five degrees of freedom. In March 2003, Computer Motion (Zeus) and Intuitive Surgical (da Vinci Surgical System) merged. The Zeus system is no longer available for clinical use.
Frederick Moll, MD, formed Intuitive Surgical in 1995 and developed the da Vinci surgical system by using robotic surgical technology from SRI International (Menlo Park, CA), formerly known as Stanford Research Institute. The original da Vinci system was designed specifically to enable the performance of closed chest coronary artery bypass grafting. .The da Vinci robotic surgical system (Intuitive Surgical, Sunnyvale, CA) was introduced in 1997 [4].
The da Vinci Surgical System consists of the control console, a tower for the insufflators and video electronics, and the patient-side cart. The surgeon sits at the control console, remote from the operative table but typically in the same room. This console is designed to provide the surgeon with an ergonomically comfortable position in which he or she can manipulate the “master,” or controls. Surgeon movements of the masters are translated into precise, real-time movements of the robotic instruments (Fig. 1). The masters manipulated the camera when a foot rests on the console itself, and a stereoscopic image is displayed below his or her hands. This gives the impression that the patient is directly in front of the surgeon. The da Vinci system uses a console with two independent monitors in front of the surgeon's eyes. With this system, the surgeon has true 3-D vision and is immersed into the surgical field. The patient-side cart provides two or three robotic arms and one endoscopic arm that execute the surgeon's commands [5].
In the original model, operations were largely completed by the two-arm device. In addition to the third working arm, instruments have become available with a diameter of 5 mm (previously 8 mm), reducing abdominal wall trauma. Only two working arms can be used at a time; the device allows the arms not in use to be kept in a static configuration while control is toggled to another arm. This allows many general surgical procedures to be performed without the need for an additional skilled assistant. The robotic arms pivot at the 1-cm operating port. This eliminated excessive torque or tension on the patient's abdominal wall during movements. The da Vinci robotic surgical instruments are designed to provide a full 7 degrees of freedom to mimic the dexterity of the human wrist. The new da Vinci Si (since April 2009) has a dual console system (Fig. 2). This optional second surgeon console enables two surgeons to collaborate during procedures for a da Vinci-enabled surgical assistance, or facilitated teaching. It allows surgeons to exchange control of the instrument arms and endoscope.
The da Vinci system uses Endowrists with seven degrees of freedom, with both pitch and yaw, which gives 360 degrees rotation of the instruments wrist. In the da Vinci system, the four robotic arms are mounted onto a cart, which is wheeled onto the operation room table. In March 1997, the first clinical robotic procedure, a cholecystectomy, was performed by Cadiere and Himpens in Brussels, Belgium, using a da Vinci robot. The first robot-assisted cardiac procedure was performed in June 1998. The da Vinci system was approved for general surgery applications in July 2000.
The robotic surgical systems have the potential to overcome the limitations of conventional videoendoscopic surgery with the help of 3-D visualization, Endowrists and precision that far surpasses conventional videoendoscopic systems and even the human hand. In general, robotic surgical systems enable extremely fine dissection, precise suturing, and maneuvering in awkward and narrow anatomic locations. Robotic surgical systems have enabled surgeons to perform complex tasks that exceed the abilities of conventional videoendoscopic techniques.
HISTORY OF MIS & LAPAROSCOPIC SURGERY AT YONSEI UNIVERSITY
1. Yoon ring
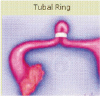
Dr. Inbae Yoon who has graduated Yonsei Medical College (Seoul, Korea) in 1961 is a pioneer of laparoscopic surgery. He invented his own laparoscopic tubal ligation system using a silicon ring, so called “Yoon ring” in 1975 [2]. The tubal ring (so call the Falope ring, Yoon ring, or Lay loop) is a small silastic band placed around a loop of the fallopian tube (Fig.3). These tubal rings are mechanical methods of tubal ligation applied to the fallopian tubes through a laparoscope. The silastic ring (that previously has been stretched over the outside of the applicator) is then released onto the tubal loop [2]. This technique eliminates the need for thermo-energy to insure tubal destruction and thus removes the cause of intestinal burns. The potential successful future recannulization procedures should be greater with this procedure. Also, even before we have started laparoscopic cholecystectomy, he has visited our school several times and had encouraged us to perform laparoscopic surgery and robotic surgery [1].
2. Laparoscopic Cholecystectomy at Yonsei University
After the Moruet's first successful laparoscopic cholecystectomy in 1987 in France [3], laparoscopic surgery has become popular in general surgery. In 1991 at Gangnam Severance hospital (Yonsei University Health System, Seoul, Korea), the first laparoscopic workshop using live animal models was performed. Professor Byong-Ro Kim has organized the workshop and KA Zucker (U.S.A.) was invited as a lecturer. Soon after the workshop, our hospital has started the laparoscopic surgery as one of the leading hospitals in Korea [1].
With the help of Inbae Yoon's inspiration and donation (more than $2 Million US), our hospital has started the “I.B. Yoon Multi-Specialty Endoscopic Research & Training Center” in 1998. This center was a root of the present “Severance Robotic and MIS center” which was started in 2005. These infrastructures has enabled us to expand laparoscopic surgery and inspires many surgeons to understand principles and equipments of laparoscopic and robotic surgery [1].
3. Automated Surgery using AESOP at Yonsei University
In June, 1996 the Korean agency of AESOP 1000 (Computer Motion, Goleta, Calif.) has brought the system to our hospital and demonstrated the system. We had preformed successfully the first solo laparoscopic cholecystectomy and appendectomy using AESOP 1000 after getting permission from the patient. The broadcasting system widely reported that “The first automated solo laparoscopic surgery was performed successfully by Woo-Jung Lee in June, 1996”. Since then Woo-Jung Lee was renowned as the beginner of robotic surgery in Korea. Several months later, our hospital (Gangnam Severance Hospital) started automated surgery using AESOP 2000 performed by Hoon-Sang Chi. That was the first system in Korea and after then only 7 systems have been installed in our country (our hospital owned 3 systems). As far as I know, only one system has been used successfully in Asan Medical Center in Korea for cardiac surgery (about 200 cases). However the AESOP system was not successful in our country since there was no economical merit compared to America. In America its usage can reduce the hospital costs by reimbursement of expenses. But in our country, surgical residents who act as assistant surgeons and camera holders have not burdened high costs to the operation. Without a reimbursement system like our country, using AESOP even increases hospital costs and may possibly interfere with surgical residential training [1].
4. da Vinci Robotic surgery at Severance Hospital Yonsei University in general
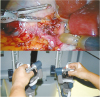
In May, 2005 the new Severance Hospital building (1000-bed new hospital) was built and we wanted to use a new cutting edge technology for our new hospital. Several new systems have started from 2005 (da Vinci surgical system, Tomotherapy, Open MRI system, etc) at our new hospital and some of them are the first in Korea. We have purchased the da Vinci four arm surgical system and started robotic surgery from July 15, 2005. That was the 13th da Vinci surgical system launched in Asia [6]. Before starting the robotic surgery on the patient, our team (4 doctors and 2 nurses) visited the da Vinci robot training center in America and we were fully trained with that surgical system (Fig. 4).
Due to high cost of using the da Vinci surgical system (patient must pay about 7,000 U.S. dollar personally: costs not covered by the National Insurance System), only 24 operations had been done during the first 6 months. But with awareness of the benefits of robotic surgery, the number of operations using the da Vinci surgical system has grown very steeply. During the first year we performed 100 cases. In July, 2007 we purchased two upgraded versions of the da Vinci S surgical system. The old version of da Vinci surgical system was sent to the training center. During a period of two and half years we have performed 500 cases. In Jan, 2008 we have installed more da Vinci S surgical systems (3 da Vinci S at Severance Hospital and one da Vinci S at Gangnam Severance Hospital). It took only 3 years and a half to perform 2000 cases. 2015 we have performed over 10000 robotic surgical cases. Nowadays we perform over 200 cases every month (with 6 systems).
We have started the 3 day multi-specialty robotic international symposium and live demonstration since 2007 annually and we have celebrated the 10 year memorial celebration symposium in Aug. 2015.
We have started MIS & robotic training center since Jan 2008. It was the first robotic training center (one da Vinci system) in Korea and 2nd center in Asia after Hong Kong. Since June 2009, we have upgraded the robotic training center to Severance da Vinci training center (one da Vinci system and one da Vinci S system). From March 2013 we have moved the training center to Avision BioMedical Research Center. From September 2014 the da Vinci training center has been equipped with all new da Vinci systems (da Vinci SHD, da Vinci SiTM, da Vinci XiTM) with the capacity of multi system training. Presently, we have seen more than 2,000 international visitors (Fig. 5).
At present (Sep. 2016) the Yonsei University Health System has 8 da Vinci systems(6 systems in the Severance Hospital including 3 systems in Yonsei Cancer Hospital, one system in Gangnam Severance Hospital and one system in Wonju Severance hospital) and 3 systems in the Severance da Vinci training center.
In Korea in Dec 2015, there are 53 systems in 41 hospitals (24 da Vinci SHD, 22 da Vinci SiTM, 7da Vinci XiTM).
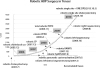
The numbers of da Vinci systems are 3597 systems in the world as of Dec. 2015 (2,399 systems in USA, 608 systems in Europe and 423 systems in Asia) (Fig. 6).
Japan started the da Vinci robotic surgery since 2009 after approval of the Japanese FDA a little later than Korea (2005) but recently (since 2012) the Japanese national health insurance covers da Vinci prostate surgery and now they have over 200 da Vinci systems and the numbers are increasing.
5. The da Vinci Robotic surgery at Severance Hospital of Yonsei University in each field (general surgery, urology, gynecology, head & neck surgery and cardio-thoracic surgery)
In July 15, 2005 at Severance Hospital of Yonsei University, Prof. Woo-Jung Lee has performed the First da Vinci Robotic operation in a patient with GB polyp & prostate cancer patient.[6] And in one year we have performed 100 cases using the da Vinci Robotic operation. With increasing demands we have bought one more da Vinci system in July 2006.
In Sep. 21 2006 we have performed the first da Vinci Robotic heart operation. We have expanded the robotic surgery in the field of general surgery, urology, cardio-thoracic surgery, gynecology and others. From May 2007 we have started da Vinci Robotic surgery at the Yongdong Severance Hospital (later changed the name with Gangnam Severance Hospital) with da Vinci S.
In Apr. 18 2008 we have performed a thousand cases of da Vinci Robotic operations with 3 doctors who have experience with over 100 cases of robotic procedures (Prof. WJ Hyung, WY Chung, and SH Paik). Among 1000 cases, the majority are done in the department of urology (436 cases), gastric cancer surgery (143 cases), thyroid cancer surgery (129 cases), colo-rectal cases (118 cases), gynecology (55 cases), esophageal cancer (34 cases) and heart surgery (20 cases).
By March 11th, 2009, three years after the start of robotic surgery, we have performed 2000 cases. And by Oct. 1st, 2009, we have performed 3000 cases of da Vinci Robotic operations.
By Nov. 11th, 2013 we have performed the 10000 cases of da Vinci Robotic operations since 2005 (during eight years and 4 months). This is one of the World Records of da Vinci operations.
By Sep. 30th, 2015, we held the international symposium of the “10th Anniversary International Robotic Live Surgery” at Severance Hospital.
Now we have 6 da Vinci Robotic systems in our Severance Hospital. Presently, (July 2016) we have performed more than 15000 cases of da Vinci Robotic surgeries. The total numbers of da Vinci robotic surgeries are as follows (until 2015): urology (4672 cases), surgery department (7549 cases including Thyroid surgery, gastric surgery, colo-rectal surgery, HBP surgery, pediatric surgery) gynecology (469 cases), ENT surgery (1072 cases), thoracic surgery (217 cases), and cardiac surgery (31 cases).
On June 17th, 2016 we have held a memorial symposium of 5000 cases of da Vinci thyroid operations at Severance hospital. And at June 29th, 2016 we have another memorial symposium of 5000 cases of da Vinci urologic surgeical operations.
As I am a Hepato-Bilio-Pancreatic surgeon, I am going to discuss about our hospital's experience with robotic HBP surgery.
Among 15000 robotic operations (including Gangnam Severance Hospital), the number of HBP robotic surgeries is about 500 cases (Fig. 7), relatively small but is slowly growing. After we have started with robotic cholecystectomy (two cases) for initial experience, we have expanded our indications for robotic HBP surgery. We started robotic choledochal cyst operation in late 2005 and presently have performed 18 cases without conversion. In 2007, we have started robotic liver resection and now we have performed 82 cases of robotic liver resections including 14 right lobectomies. In June of 2007, we started robotic pancreatic cyst enucleation and now we have performed 95 cases in robotic pancreatic surgery including 61 distal pancreatectomies, 8 central pancreatectomies and 10 PPPD (pylorus preserving pancreato duodenectomies). With our good results of laparoscopic simple cholecystectomy and lymph node dissection including aortocaval lymph node(#16) for early gall bladder cancer less than a T2 lesion, we have applied this technique using the robotic system and we have performed 12 robotic cases of cholecystectomy and lymph node dissection for GB cancer less than a T2 lesion without any present recurrences. Recently we have applied this minimally invasive technique (simple cholecystectomy and lymph node dissection including nodes in station #16) even for open surgery for early GB cancer(less than T2) and we could achieve very good results. We have started Robotic single site cholecystectomy since Oct. 2014 and performed 185 cases until presently. In Oct. 2015 we have performed robotic single site procedure plus one port distal pancreato-splenectomy (Fig. 8).
DEVELOPMENTS OF KOREAN SURGICAL ROBOTIC SYSTEMY
As the da Vinci surgical robotic system was introduced, the number of the systems has increased dramatically and the indications of operations have been greatly widened. But there is still a big problem when using the da Vinci robotic system. The price of the system and the price of each instrument are very high and in only a few countries it is covered by an insurance system. For example, in our country the patient should pay a premium of about 10,000 US dollar for tbhe robotic surgery in addition to the regular money for admission and operation. Due to economic problems, we want to develop a cheap system for our own country. With the help of a company (Meere Company, Korea) Prof. Woo-Jung Lee have started to develop our own Korean Laparoscopic Surgical Robotic System since 2007.
As early generations of Korean Systems, we have had the opportunity to meet with an American engineer who has experience in surgical robotic systems (Laprotek, USA) and we have started with a system similar to Laprotek (first generation). We have found some limitations of the first generation system and have designed new systems (second generation) somewhat different from the da Vinci system. We have designed a single row pulley system for the surgical instrument because we want a more slim design but it uses the same hand grip from the master control(same as Laprotek) because we thought that hand grip is good for inserting haptic sensing over the finger grip of the da Vinci system.
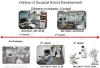
With recent change in Korean Systems, we had to change some of the configurations from the 2nd to 4th generation robotic system.1. Change the master grip from hand grip to finger grip, because many surgeons want to use a similar master system with the da Vinci system. 2. We changed the arrangement of pulley system from single row to double row, because of difficulty in inserting the instrument. 3. We had decided to change the viewing system from monitor to console system with mirror use. 4. We have decided to develop a single port robotic system that can be used with same system. Because the da Vinci system has some difficulty in the operation of small fields, we want to develop a system that can be interchangeable to single port laparoscopic surgery. In 2012 we have made the 4th generation surgical robotic system. And we have named the final version of the 4th generation as the REVO-I robotic surgical system (MSR 5000) with a master-slave robot system that consists of a surgeon control console (MSRC-5000) and an operation cart (MSRO-5000). The surgeon control console has a 3-dimensional image viewer, a handle, and a foot pedal unit. The handle transmits the surgeon's hand movements to the robot arm of the operation cart. The operation cart has four arms (A–D) including the camera (C) arm. The A, B, and D arms are used to manipulate the instruments and the foot pedal unit is used to change arms or to disengage an arm from the handle. We have recently started animal experiments. We think this system is almost similar to the function of the da Vinci Si system (Fig. 9). In 2015 upon approval by the Institutional Animal Care and Use Committee of Yonsei University Health System, cholecystectomy and uterine horn anastomosis was performed in four pigs using the Revo-I robotic surgical system (Model MSR-5000) in Korea and there were no perioperative complications and none of the in vivo models exhibited abnormal behavior during the postoperative observation period. We have received IRB permission concerning human clinical studies in 2016. From Aug. 2016 we are performing human clinical trials at Severance Hospital with robotic cholecystectomy and prostate cancer surgery using the Rovo-I surgical robotic system from the Meere Company in Korea.
RECENT DEVELOPMENTS OF ROBOTIC SURGERY
The da Vinci S surgical system was made available in 2006 and has some time-saving features such as quick-connect docking ports. Newer features also include an updated visualization system and an optional scope with a separate wide-angle image. However, the actual footprint and size of the device is very similar to the original design. The new da Vinci Si (since April 2009) has a dual console system (Fig. 3). This optional second surgeon console enables two surgeons to collaborate during a procedure for da Vinci-enabled surgical assistance, or to facilitate teaching. It allows surgeons to exchange control of the instrument arms and endoscope. This da Vinci Xi system was available in 2014. Its boom-mounted system with the flexibility of a mobile platform enables placement of the surgical cart at any position around the patient while allowing four-quadrant anatomical access. It is designed to support the EndoWrist Stapler for articulation in stapling and the EndoWrist Vessel Sealer for cutting and sealing. It is also FIREFLYTM Fluorescence imaging capable. Firefly represents fluorescence imaging of real-time visualization and assessment of vessels, bile ducts and tissue perfusion.
CONCLUSION
Laparoscopic surgery is a transition technology that marked the beginning of the information age revolution for surgery. Telepresence surgery, robotics, tele-education, and telementoring are the next step in the revolution. Using computer-aided systems such as robotics and image-guided surgery, the next generation of surgical systems will be more sophisticated and will permit surgeons to perform surgical procedures beyond the current limitations of human performance, especially at the microscale or on moving organs. As a specialty field, robotics should continue to grow. As the robotic era enters the world of general surgery, more and more complex procedures will be able to be approached through small incisions. As technology catches up with our imagination, robotic instruments and 3D monitoring will become routine and continue to improve patient care by providing surgeons with the most precise, least traumatic ways of treating surgical disease.
Compared to the industrial robotic technology, the medical robotic technology is not developed very well. Nevertheless, due to our hospitals' successful achievements in robotic surgery, we could draw not only public attention but also robotic engineers and industries. With collaboration between medicine and robotic engineering, we can develop our own version of Korean da Vinci like robotic system in the near future.






 XML Download
XML Download